4.12 Classificatie
Definitie:
De puntenwolk bevat standaard enkel de positie van het meetpunt. Daarnaast kunnen eigenschappen aan ieder punt in de puntenwolk worden toegevoegd, een daarvan is classificatie.
Classificatie is het indelen van individuen in klassen waar deze toe behoren op basis van overeenkomsten in eigenschappen.
Afspraak:
Puntenwolken worden niet geclassificeerd, tenzij dit voor automatisering een doel dient. In dat geval worden maatwerkafspraken gemaakt.
Toelichting:
- In de bouw is het (anno 2023) nog niet zo gebruikelijk om de puntenwolken te classificeren als dat het geval is in de civiele sector of bij toepassing voor grootschalige inwinning. De in de markt regulier gebruikte software is nog niet zo ver dat dit vlot eenvoudig en juist kan. Verwacht wordt, gelet op de ontwikkelingen, dat het binnen enkele jaren meer regulier gaat worden.
- Is automatisering een doel, maak dan maatwerkafspraken en houd rekening met het feit dat ‘ruw’ classificeren volgens de ASPRS standaard (American Society for Photogrammetry and Remote Sensing) regulier is, maar waarschijnlijk niet alle doelen volledig zal dienen. Met ruw classificeren wordt bedoeld het gebruiken van de ASPRS Standaard Point Classes. Zie ook tabel 1 en onderstaande illustratie.
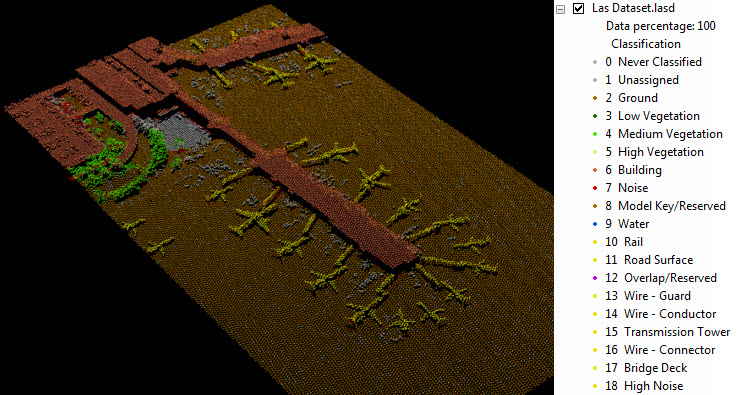
Figuur 1: voorbeeld basis classificatie getoond in ArcMAP. Bron: https://desktop.arcgis.com/en/arcmap/latest/manage-data/las-dataset/lidar-point-classification.htm
- Classificatie van de puntenwolk bepaalt de mogelijkheden om automatisch informatie af te leiden (zoals een digitaal terreinmodel). Voor het classificeren worden algoritmen toegepast om de punten te labelen. Waarde van meer nauwkeurige classificatie verschilt sterk per domein en beoogde toepassing. Er is behoefte hieraan wanneer gebruik wordt gemaakt van automatiseringstechnieken om puntenwolken om te zetten naar objectinformatie. In dergelijke gevallen is ruw classificeren niet altijd voldoende en zijn domeinspecifieke aanvullende afspraken nodig.
Tabel 1: ASPRS Standard LIDAR Point Classes
(Point Data Record Formats 6-10)
| Waarde | Betekenis |
| 0 | Created, never classified |
| 1 | Unclassified |
| 2 | Ground |
| 3 | Low Vegetation |
| 4 | Medium Vegetation |
| 5 | High Vegetation |
| 6 | Building |
| 7 | Low Point (noise) |
| 8 | Reserved |
| 9 | Water |
| 10 | Rail |
| 11 | Road Surface |
| 12 | Reserved |
| 13 | Wire – Guard (Shield) |
| 14 | Wire – Conductor (Phase) |
| 15 | Transmission Tower |
| 16 | Wire-structure Connector (e.g. Insulator) |
| 17 | Bridge Deck |
| 18 | High Noise |
| 19 – 63 | Reserved |
| 64 – 255 | User definable |